ABSTRAK
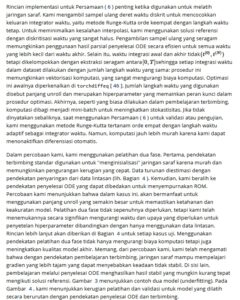
Persamaan Diferensial Biasa (ODE) Neural merupakan kemajuan signifikan di persimpangan pembelajaran mesin dan sistem dinamis, yang menawarkan analog waktu kontinu untuk jaringan saraf diskrit. Meskipun menjanjikan, penerapan ODE neural dalam aplikasi praktis sering kali menghadapi tantangan kekakuan, suatu kondisi di mana variasi cepat dalam beberapa komponen solusi menuntut langkah waktu yang sangat kecil untuk penyelesai eksplisit. Karya ini membahas masalah kekakuan saat menggunakan ODE neural untuk reduksi orde model dengan memperkenalkan reparametrisasi yang sesuai dalam waktu. Pemetaan yang dipertimbangkan digerakkan oleh data, dan diinduksi oleh langkah waktu adaptif dari penyelesai implisit pada solusi referensi. Kami menunjukkan bahwa pemetaan menghasilkan sistem yang tidak kaku yang dapat diselesaikan dengan mudah dengan skema integrasi waktu eksplisit. Dinamika waktu kaku asli dipulihkan melalui pemetaan yang dipelajari oleh jaringan saraf yang menghubungkan ruang keadaan ke reparametrisasi waktu. Kami memvalidasi metode kami melalui eksperimen ekstensif, menunjukkan peningkatan efisiensi untuk inferensi ODE saraf sambil mempertahankan ketahanan dan akurasi jika dibandingkan dengan penyelesai implisit yang diterapkan pada sistem kaku dengan sisi kanan asli.
1 Pendahuluan
Dalam ilmu komputasi dan rekayasa, kompleksitas dan skala simulasi numerik telah tumbuh secara eksponensial, didorong oleh kemajuan dalam perangkat keras dan algoritma. Model fidelitas tinggi—juga disebut Full Order Models (FOMs)—sekarang dapat menangkap detail rumit dari fenomena fisik di berbagai domain seperti dinamika fluida, analisis struktural, pemodelan iklim, dan ilmu material. Namun, meningkatnya kompleksitas model-model ini sering kali disertai dengan biaya komputasi yang signifikan, sehingga tidak praktis untuk banyak aplikasi yang memerlukan evaluasi model berulang atas sejumlah besar nilai parameter. Memang, biaya komputasi didorong oleh kutukan dimensionalitas [ 1 ].
Reduced-Order Models (ROMs) telah muncul sebagai solusi yang ampuh untuk tantangan ini, menawarkan keseimbangan antara akurasi dan efisiensi komputasi. Dengan mengompresi fitur-fitur penting FOM ke dalam bentuk yang lebih mudah dikelola, yang biasanya disebut ruang laten, ROM memungkinkan simulasi dan analisis sistem yang kompleks secara efisien, terutama yang memerlukan analisis waktu nyata [ 2 ], masalah invers [ 3 – 6 ], kuantifikasi ketidakpastian [ 7 – 9 ], optimasi bentuk [ 10 ] atau kontrol optimal [ 11 – 13 ].
Bidang ROM telah mengalami pertumbuhan yang signifikan, menyediakan berbagai macam teknik yang dapat dipilih oleh para praktisi. Setiap metode memiliki serangkaian kelebihan dan kekurangannya sendiri, dan pilihan ROM yang optimal sering kali bergantung pada persyaratan khusus aplikasi. Memang, istilah ROM mengacu pada beberapa pendekatan, yang agak berbeda satu sama lain.
Salah satu paradigma yang paling mapan untuk reduksi orde model adalah dekomposisi ortogonal yang tepat (POD) [ 14 , 15 ], yaitu, teknik proyeksi linier yang memberikan tingkat kompresi tinggi dan, misalnya, mencapai tingkat akurasi yang sangat tinggi dalam kasus proses difusi.
Jika persamaan yang mengatur model fidelitas tinggi secara eksplisit digunakan dalam ROM, mereka disebut intrusif [ 16 – 20 ]. Biasanya, algoritma greedy atau POD digunakan untuk memproyeksikan FOM ke ruang berdimensi lebih rendah. Namun, untuk model nonlinier, teknik tambahan seperti metode interpolasi empiris (diskrit) diperlukan untuk menangani kompleksitas, yang dapat menyebabkan tradeoff yang tidak menguntungkan antara akurasi dan efisiensi komputasi [ 21 – 23 ] . Selain itu, dalam [ 24 ] telah ditunjukkan bahwa untuk masalah yang didominasi transportasi, dimensi laten yang besar harus digunakan untuk mencapai akurasi yang wajar saat menggunakan POD, sehingga membatasi penggunaan praktisnya.
Dalam beberapa tahun terakhir, metode berbasis data berdasarkan pembelajaran mesin dan pembelajaran mendalam telah memperoleh daya tarik besar karena kemajuan dalam perangkat keras berbasis GPU dan pengembangan dalam algoritma dan perangkat lunak yang mendukung ekosistem kecerdasan buatan. Paradigma ini didasarkan pada ketersediaan sejumlah besar data fidelitas tinggi yang dapat digunakan untuk melatih model. Pendekatan ini terbukti efektif jika sejumlah besar sumber daya yang digunakan dalam fase offline (pembuatan solusi dan pelatihan model) dibayar kembali oleh sejumlah besar evaluasi (murah) dari model yang dilatih (fase online). Model-model ini disebut non-intrusif karena hanya pengetahuan tentang data yang diperlukan untuk membangunnya [ 25 , 26 ]. Kami juga menyebut ROM jenis ini sebagai model pengganti, mengingat kemampuannya untuk memperkirakan perilaku FOM asli dari data. Bidang ini terus berkembang, dengan sejumlah besar teknik yang dikembangkan dan diterbitkan. Sejauh pengetahuan kami, contoh pendekatan berbasis data yang paling relevan adalah sebagai berikut. Model penutupan adalah hibrida antara POD dan pendekatan berbasis data di mana istilah nonlinier (jaringan saraf) ditambahkan ke ROM linier (biasanya POD-Galerkin) untuk memperhitungkan efek dinamika yang belum terselesaikan [ 27 ]. Dalam [ 28 – 32 ], autoencoder yang terhubung rapat atau konvolusional telah digunakan untuk mengekstraksi variabel laten penuh. Teknik lain telah diusulkan untuk meningkatkan akurasi. Misalnya, jaringan saraf grafik (GNN) mengatasi masalah geometri rumit yang didiskritkan dengan jaring tak terstruktur, menawarkan representasi variabel yang lebih alami menggunakan grafik [ 33 , 34 ]. Operator saraf Fourier adalah pendekatan yang sangat sukses yang malah mengeksploitasi ruang frekuensi untuk memperkaya lapisan model [ 35 – 37 ]. Tergantung pada model yang dipertimbangkan, evolusi waktu dapat diperlakukan seperti parameter sistem lainnya atau dipelajari secara eksplisit, contohnya adalah DeepONets [ 31 , 38 ], dekomposisi mode dinamis [ 39 , 40 ], identifikasi jarang dinamika laten tereduksi (SINDy) [ 41 , 42 ], RNN [ 43 ], LSTM [ 32 , 44 ] atau proses Gaussian [ 45 ].
Pendekatan evolusi waktu lain yang menarik adalah yang berbasis pada neural ODE [ 46-49 ]. Konsep inti dari metode ini sederhana: metode ini melibatkan pembelajaran sisi kanan sistem dinamis dengan jaringan saraf padat, yang dapat dilihat sebagai limit kontinu dari jaringan saraf residual. Pendekatan ini menawarkan banyak keuntungan, termasuk representasi data waktu kontinu yang lebih alami dan peningkatan efisiensi parameter dan memori. Tantangan utama dengan neural ODE adalah bahwa pada dasarnya, mereka adalah ODE yang harus dipecahkan. Hal ini sering menimbulkan masalah dengan kekakuan, yang memperumit solusi mereka dan berpotensi memengaruhi stabilitas dan akurasinya. Kekakuan adalah kondisi di mana ada perubahan cepat pada beberapa komponen solusi sementara komponen lain berubah perlahan. Fenomena ini menciptakan tantangan numerik saat memecahkan persamaan, karena metode numerik eksplisit mungkin menjadi tidak efisien atau tidak stabil [ 50 ]. Dengan demikian, kebutuhan untuk menggunakan penyelesai implisit secara signifikan meningkatkan biaya.
Dalam karya ini, kami menangani masalah membangun ROM dari sistem yang kaku. Dalam kasus ini, hambatan utama tidak diwakili oleh sejumlah besar variabel sistem tetapi oleh kekakuan sistem. Memang, ada beberapa jenis kekakuan, yang biasanya terhubung ke fitur sistem, seperti keberadaan beberapa skala waktu, spektrum Jacobian sistem, atau ketidakstabilan numerik, yang membuat pembangunan ROM menjadi tugas yang menantang. Dalam hal ini, menggunakan time-stepper waktu tetap tidak layak karena skala yang berubah dengan cepat memerlukan langkah-langkah yang sangat kecil. Di sisi lain, memperlakukan waktu seperti input jaringan saraf padat juga terbukti bermasalah karena jaringan saraf diketahui berkinerja buruk pada frekuensi tinggi [ 51 ]. Namun, dalam literatur, dapat ditemukan beberapa contoh masalah kaku yang diselesaikan dengan pembelajaran mesin. Solusi yang mungkin pertama kali diajukan dalam [ 52 ], di mana penulis menggunakan asumsi quasi-steady-state (QSSA) untuk mengurangi kekakuan sistem ODE dan menunjukkan bahwa jaringan saraf yang diinformasikan fisika (PINN) kemudian dapat berhasil diterapkan pada sistem non-/mild-kaku yang dikonversi. Ini sangat menarik karena sistem dapat dipecahkan dengan metode eksplisit. Dalam [ 53 ], penulis menunjukkan bahwa menghitung gradien yang distabilkan dan penskalaan yang sesuai dari keluaran jaringan memungkinkan pembelajaran ODE saraf kaku. Dalam [ 54 ], PINN digunakan dengan mesin pembelajaran ekstrem untuk memecahkan masalah kaku. Dalam [ 55 ], model farmakologi sistem kuantitatif kaku dipercepat dengan jaringan status gema. Dalam [ 56 ], autoencoder digunakan untuk menghasilkan ROM model kinetika kimia untuk simulasi sistem pembakaran. Baru-baru ini, dalam [ 57 ] DeepONets digunakan untuk mempelajari solusi terdiskritisasi dari kinetika kimia kaku yang menantang.
Strategi kami adalah menggunakan ODE neural berbasis non-stiff surrogate untuk dinamika kaku. Yaitu, kami bertujuan untuk menggunakan ODE neural untuk mempelajari sistem kaku yang diparameterisasi ulang waktu, di mana peta waktu dibangun dengan tepat untuk mengurangi kekakuan masalah. Wawasannya adalah untuk mengeksploitasi keuntungan dari ODE neural yang kami jelaskan sebelumnya sambil menjaga biaya (online) untuk memecahkan ODE di bawah kendali dengan menggunakan penyelesai eksplisit. Memang, kontribusi utama kami adalah menggunakan reparametrisasi waktu yang disebabkan oleh langkah waktu penyelesai implisit sebagai cara untuk mengurangi kekakuan sistem. Keuntungan dari prosedur ini adalah bahwa hal itu murni digerakkan oleh data, yang berarti bahwa adalah mungkin untuk menghindari secara manual memperoleh ekspresi aljabar eksplisit untuk spesies QSS seperti yang dilakukan dalam [ 52 ]. Di sisi lain, kelemahan dari pendekatan kami adalah bahwa hal itu hanya bermanfaat untuk ROM: fase pengumpulan data yang mahal untuk membangun pemetaan waktu harus diimbangi dengan fase online yang murah. Teknik kami juga dapat diartikan sebagai cara untuk menanamkan langkah waktu adaptif (implisit) langsung ke dalam ODE saraf. Dengan demikian, kita dapat menghindari backpropagation melalui penyelesai implisit, yang menimbulkan biaya kubik sehubungan dengan jumlah parameter jaringan saraf [ 53 ], sehingga sangat mengurangi biaya komputasi untuk melatih ODE saraf. Strategi reparametrisasi kami juga terhubung dengan [ 58 – 60 ], di mana penulis memanfaatkan pemetaan spasial untuk penyempurnaan mesh adaptif untuk meningkatkan efisiensi komputasi dan untuk meningkatkan representasi dinamika nonlinier dalam sistem yang kompleks. Selain itu, pekerjaan terbaru [ 61 ] telah menunjukkan bahwa NODE yang mempertahankan struktur dengan pemisahan linier/nonlinier dapat mencapai stabilitas jangka panjang pada masalah kaku yang sebanding dengan metode implisit. Setelah sistem yang tidak kaku dipecahkan, solusinya dipetakan kembali ke dinamika kaku menggunakan peta yang dipelajari dengan jaringan saraf. Jaringan saraf dilatih sekali dengan ODE saraf dan menunjukkan sifat generalisasi yang baik ke parameter di luar set data pelatihan. Perhatian khusus diberikan dalam definisi peta sehingga tidak bergantung pada waktu. Oleh karena itu, model mempertahankan generalisasi yang baik dalam waktu untuk sistem periodik karena hanya ada ketergantungan eksplisit pada ruang keadaan.
Teknik kami dirancang khusus untuk masalah di mana kekakuan dapat ditelusuri kembali ke kasus nilai eigen besar dengan bagian riil negatif. Memang, jenis kekakuan lain yang banyak dipelajari adalah kekakuan frekuensi tinggi, yang sesuai dengan kasus nilai eigen yang cukup besar tetapi frekuensi sangat tinggi [ 62 ]. Dalam kasus ini, sistem memiliki solusi cepat dan lambat, di mana solusi cepat harus dipecahkan secara akurat untuk melacak yang lambat. Sementara pendekatan reparametrisasi telah diusulkan [ 63 ], mereka memiliki keterbatasan yang signifikan karena mereka perlu menyelesaikan frekuensi cepat [ 64 , 65 ]. Dengan demikian, jenis kekakuan ini tetap menjadi tantangan bagi pendekatan kami dan area penelitian yang sedang berlangsung. Memang, penulis lain telah mengeksplorasi teknik pembelajaran mesin yang mempertahankan struktur, seperti jaringan saraf cepat-lambat, untuk melewati resolusi langsung transien cepat dalam sistem yang terganggu secara tunggal [ 66 ].
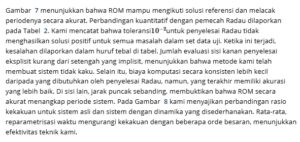
Kami menunjukkan keakuratan dan kecepatan ROM yang diusulkan pada serangkaian lima masalah pengujian, di mana penyelesai eksplisit biasanya gagal, banyak digunakan dalam literatur untuk membandingkan penyelesai ODE kaku [ 67 ]. Hasilnya dibandingkan dengan penyelesai implisit Runge-Kutta terkini dari jenis Radau II A orde kelima [ 50 ] yang diterapkan pada sistem kaku dengan sisi kanan asli.
Sisa dari makalah ini disusun sebagai berikut. Pertama, di Bagian 2 kami memperkenalkan pengaturan dan notasi matematika untuk masalah yang menjadi perhatian. Secara khusus, di Bagian 2.4 kami mengulas pendekatan ODE saraf, yang merupakan dasar dari karya ini. Di Bagian 3 kami memperkenalkan metodologi kami, membahas juga rincian implementasi. Di Bagian 4 kami menyajikan serangkaian hasil numerik yang komprehensif. Akhirnya, di Bagian 5 kami menarik beberapa kesimpulan, membahas kekuatan dan keterbatasan dari pendekatan yang diusulkan.
2 Perumusan Masalah
Pada bagian ini, pertama-tama kami menyajikan konstruksi ROM dalam bentuk aljabar untuk memperkirakan sistem dinamis parametrik. Kemudian, kami memberikan gambaran singkat tentang konsep pembelajaran mendalam yang mendasar dan merumuskan masalah pengurangan orde model berbasis data dalam kerangka kerja ODE neural.
2.1 Sistem Parametrik Persamaan Diferensial Biasa
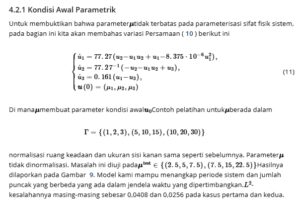
Kami mempertimbangkan sistem dinamis berparameter dan berdimensi-hingga berikut ini, yang dijelaskan oleh serangkaian ODE orde pertama:





![]()










| μ | Pemecah masalah | tol | waktu [s] | # demam | #jev bahasa inggris | # aku | MSE ts | L2 | dpeak |
|---|---|---|---|---|---|---|---|---|---|
| 102.01 | Bahasa Indonesia: ROM | 1/40 | 0,033 | 1000 | angka 0 | angka 0 | 4.13e-3 | 0,03520 | 0.662 |
| Radau | 10−2 | 0,046 tahun | tahun 2470 | 110 | 516 | — | 0,01447 pukul 0,01447 | 0.811 | |
| 10−1.5 | 0,041 tahun | tahun 2342 | 105 | 482 | — | 0.37252 | pukul 14.59 | ||
| 102.67 | Bahasa Indonesia: ROM | 1/40 | 0,033 | 1000 | angka 0 | angka 0 | 2.39e-3 | 0,02262 | 2.665 |
| Radau | 10−2 | 0,056 tahun | 3316 | 133 | 688 | — | 0,00870 | 2.075 | |
| 10−1.5 | 0,046 tahun | tahun 2591 | 118 | 576 | — | 0.53100 | 181.5 | ||
| 103.33 | Bahasa Indonesia: ROM | 1/40 | 0,033 | 1000 | angka 0 | angka 0 | 5.94e-3 | 0,03098 | 19.27 |
| Radau | 10−2 | 0,072 | 3850 | 154 | tahun 806 | — | 0,00742 tahun | 8.083 | |
| 10−1.5 | 0,052 | tahun 2992 | 137 | 684 | — | 0.29987 | 655.2 | ||
| 103.99 | Bahasa Indonesia: ROM | 1/40 | 0,033 | 1000 | angka 0 | angka 0 | 7.23e-3 | 0,04768 pukul 0,04768 | 191.0 |
| Radau | 10−2 | 0,078 tahun | 4418 | 156 | 938 | — | 0,04377 tahun | 210.9 | |
| 10−1.5 | 0,058 | 3337 | 148 | 768 | — | 0.17724 | tahun 2822 |

| μ | Pemecah masalah | tol | waktu [s] | # demam | #jev bahasa inggris | # aku | MSE ts | L2 | dpeak |
|---|---|---|---|---|---|---|---|---|---|
| (52.5,0.025,10−5.975) | Bahasa Indonesia: ROM | 2·10−4 | 0,037 hari | tahun 1130 | angka 0 | angka 0 | 1.20e-3 | 1.19e-2 | 1.668 |
| Radau | 10−3 | 0,065 tahun | 3777 | 167 | 656 | — | 1.31e-5 | 3.032 | |
| 10−1.5 | 0,059 tahun | 3213 | 165 | 664 | — | 0.4691 | 6.092 | ||
| (97.5,0.025,10−5.975) | Bahasa Indonesia: ROM | 2·10−4 | 0,034 tahun | tahun 1046 | angka 0 | angka 0 | 4.52e-3 | 7.75e-2 | 5.041 |
| Radau | 10−3 | 0,067 tahun | 3445 | 159 | 600 | — | 2.12e-5 | 4.632 | |
| 10−1.5 | 0,054 tahun | tahun 2815 | 141 | 556 | — | 0,0099 | 6.574 | ||
| (52.5,0.175,10−5.975) | Bahasa Indonesia: ROM | 2·10−4 | 0,065 tahun | tahun 1970 | angka 0 | angka 0 | 2.64e-3 | 5.67e-2 | 1.810 |
| Radau | 0.111 | 6590 | 310 | tahun 1100 | — | 8.47e-5 | 1.115 | ||
| 10−1.5 | 0,095 | 5342 | 277 | tahun 1068 | — | 0,0079 tahun | 1.432 | ||
| Bahasa Indonesia: ROM | 2·10−4 | 0,057 tahun | tahun 1694 | angka 0 | angka 0 | 1.41e-3 | 3.08e-2 | 1.134 | |
| Radau | 10−3 | 0,074 tahun | 4649 | 212 | 744 | — | 1.43e-5 | 0.467 | |
| 10−1.5 | 0,068 tahun | 3654 | 197 | 712 | — | 0,0163 | 3.831 | ||
| Bahasa Indonesia: ROM | 2·10−4 | 0,048 tahun | tahun 1454 | angka 0 | angka 0 | 3.45e-3 | 5.14e-2 | 5.976 | |
| Radau | 10−3 | 0,063 tahun | 3895 | 183 | 666 | — | 3.73e-5 | 2.885 | |
| 10−1.5 | 0,033 | tahun 1814 | 92 | 364 | — | 3.8838 | 464.3 | ||
| Bahasa Indonesia: ROM | 2·10−4 | 0,049 tahun | tahun 1466 | angka 0 | angka 0 | 1.85e-3 | 6.27e-2 | 2.355 | |
| Radau | 10−3 | 0,062 tahun | 3809 | 172 | 658 | — | 8.83e-5 | 7.598 | |
| 10−1.5 | 0,037 hari | Tahun 2021 | 100 | 392 | — | 2.6084 | 257.8 | ||
| Bahasa Indonesia: ROM | 2·10−4 | 0,088 | tahun 2690 | angka 0 | angka 0 | 2.17e-3 | 1.17e-2 | 1.366 | |
| Radau | 10−3 | 0.117 | 7148 | 319 | tahun 1202 | — | 1.33e-5 | 1.100 | |
| 10−1.5 | 0,098 | 5433 | 292 | tahun 1054 | — | 0,0039 | 1.888 | ||
| Bahasa Indonesia: ROM | 2·10−4 | 0,059 tahun | tahun 1770 | angka 0 | angka 0 | 2.57e-3 | 2.28e-2 | 1.920 | |
| Radau | 10−3 | 0,077 tahun | 4781 | 217 | 814 | — | 2.35e-5 | 1.102 | |
| 10−1.5 | 0,066 tahun | 3635 | 196 | 712 | — | 0,0101 | 0,992 |
Catatan: Perbandingan biaya komputasi dan akurasi untuk penyelesai Radau dan ROM berbasis ODE neural pada set data pengujian. Lihat Bagian 4 untuk definisi metrik. Dalam huruf tebal, kesalahan terjadi saat solusinya tidak positif.



| μ | Pemecah masalah | rtol (atol) | waktu [s] | # demam | #jev bahasa inggris | # aku | MSE ts | MSE |
|---|---|---|---|---|---|---|---|---|
| (0.006,103.025,3·107) | Bahasa Indonesia: ROM | 2·10−4 | 0,008 | 230 | angka 0 | angka 0 | 1.21e-5 | 2.40e-4 |
| Radau | 10−4(10−7) | 0,019 | 927 | 44 | 210 | — | 6.72e-6 | |
| 10−3(10−6) | 0,051 tahun | 3055 | 132 | 798 | — | 9.58e11 | ||
| (0.006,104.975,3·107) | Bahasa Indonesia: ROM | 2·10−4 | 0,009 | 272 | angka 0 | angka 0 | 1.19e-3 | 1.11e-3 |
| Radau | 10−4(10−7) | 0,021 | tahun 1100 | 52 | 240 | — | 5.74e-6 | |
| 10−3(10−6) | 0,016 | 790 | 53 | 194 | — | 2.65e-5 | ||
| (0.049,103.025,3·107) | Bahasa Indonesia: ROM | 2·10−4 | 0,007 tahun | 206 | angka 0 | angka 0 | 4.34e-4 | 4.97e-5 |
| Radau | 10−4(10−7) | 0,021 | tahun 1081 | 46 | 256 | — | 4.49e-6 | |
| 10−3(10−6) | 0,030 | tahun 1787 | 73 | 406 | — | 1.9626 | ||
| (0.049,104.975,3·107) | Bahasa Indonesia: ROM | 2·10−4 | 0,009 | 260 | angka 0 | angka 0 | 4.46e-4 | 9.80e-4 |
| Radau | 10−4(10−7) | 0,024 | tahun 1121 | 55 | 248 | — | 3.35e-6 | |
| 10−3(10−6) | 0,014 tahun | 795 | 50 | 198 | — | 1.50e-5 |
Catatan: Perbandingan biaya komputasi dan akurasi untuk penyelesai Radau dan ROM berbasis ODE neural pada set data pengujian. Lihat Bagian 4 untuk definisi metrik.
4.4 Kasus Uji 4: Masalah E5
Masalah E5 terdiri dari sistem kaku berikut dari 4 ODE nonlinier:


| μ | Pemecah masalah | rtol (atol) | waktu [s] | # demam | #jev bahasa inggris | # aku | MSE ts | MSE |
|---|---|---|---|---|---|---|---|---|
| (5·10−9.975,107.025,1.13e3,106) | Bahasa Indonesia: ROM | 2·10−4 | 0,013 | 308 | angka 0 | angka 0 | 4.12e-2 | 5.06e-3 |
| Radau | 10−6(10−20) | 0,064 tahun | 4119 | 93 | 416 | — | 8.36e-4 | |
| (5·10−9.025,107.025,1.13e3,106) | Bahasa Indonesia: ROM | 2·10−4 | 0,015 | 344 | angka 0 | angka 0 | 4.97e-2 | 4.00e-3 |
| Radau | 10−6(10−20) | 0,065 tahun | 4156 | 102 | 426 | — | 1.84e-2 | |
| (5·10−9.975,107.975,1.13e3,106) | Bahasa Indonesia: ROM | 2·10−4 | 0,013 | 302 | angka 0 | angka 0 | 1.56e-2 | 4.80e-3 |
| Radau | 10−6(10−20) | 0,063 tahun | tahun 4003 | 103 | 430 | — | 9.87e-4 | |
| (5·10−9.025,107.975,1.13e3,106) | Bahasa Indonesia: ROM | 2·10−4 | 0,011 | 260 | angka 0 | angka 0 | 6.48e-2 | 5.53e-3 |
| Radau | 10−6(10−20) | 0,068 tahun | 4055 | 112 | 438 | — | 1.88e-2 |
Catatan: Perbandingan biaya komputasi dan akurasi untuk penyelesai Radau dan ROM berbasis ODE neural pada set data pengujian. Lihat Bagian 4 untuk definisi metrik.

| Reaksi | r | μ(0) | Reaksi | r | μ(0) | Reaksi | r | μ(0) |
|---|---|---|---|---|---|---|---|---|
| 1 | μ1u1 | 0.350e0 | 10 | μ10u11u1 | 0.900e4 | 19 | μ19u16 | 0.444e12 |
| 2 | μ2u2u4 | 0.266e2 | 11 | μ11u13 | 0,220e-1 | 20 | μ20u17u6 | 0.124e4 |
| 3 | μ3u5u2 | 0.120e5 | 12 | μ12u10u2 | 0.120e5 | 21 | μ21u19 | 0.210e1 |
| 4 | μ4u7 | 0.860e-3 | 13 | μ13u14 | 0.188e1 | 22 | μ22u19 | 0.578e1 |
| 5 | μ5u7 | 0.820e-3 | 14 | μ14u1u6 | 0.163e5 | 23 | μ23u1u4 | 0.474e-1 |
| 6 | μ6u7u6 | 0.150e5 | 15 | μ15u3 | 0.480e7 | 24 | μ24u19u1 | 0.178e4 |
| 7 | μ7u9 | 0.130e-3 | 16 | μ16u4 | 0,350e-3 | 25 | μ25u20 | 0.312e1 |
| 8 | μ8u9u6 | 0.240e5 | 17 | μ17u4 | 0,175e-1 | |||
| 9 | aku9kamu11kamu2 | 0.165e5 | 18 | aku18kamu16 | 0.100e9 |

| μ | Pemecah masalah | tol | waktu [s] | # demam | #jev bahasa inggris | # aku | MSE ts | MSE |
|---|---|---|---|---|---|---|---|---|
| μi=0.525μi(0),i=4,6,14 | Bahasa Indonesia: ROM | 10−4 | 0,006 | 194 | angka 0 | angka 0 | 6.89e-4 | 9.80e-4 |
| Radau | 10−4 | 0,011 | 182 | 10 | 50 | — | 3.81e-3 | |
| 10−3 | 0,011 | 149 | 10 | 40 | — | 0.2077 | ||
| μi=1.975μi(0),i=4,6,14 | Bahasa Indonesia: ROM | 10−4 | 0,007 tahun | 212 | angka 0 | angka 0 | 1.16e-3 | 1.69e-3 |
| Radau | 10−4 | 0,017 tahun | 268 | 14 | 70 | — | 9.03e-4 | |
| 10−3 | 0,014 tahun | 203 | 12 | 54 | — | 4.63e-3 |



